
ロボット
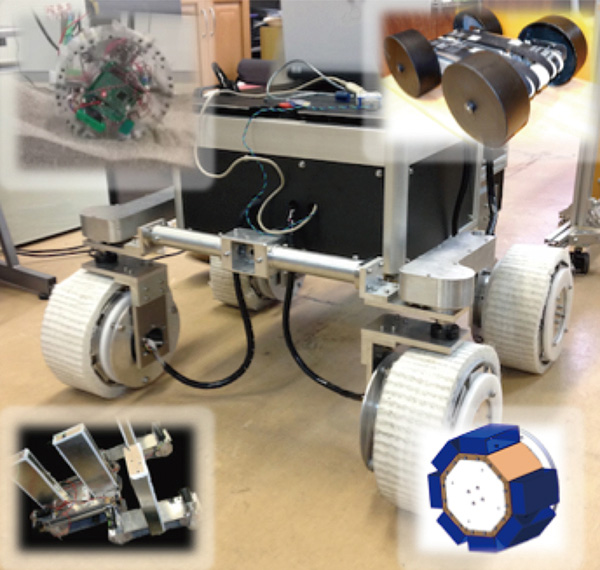
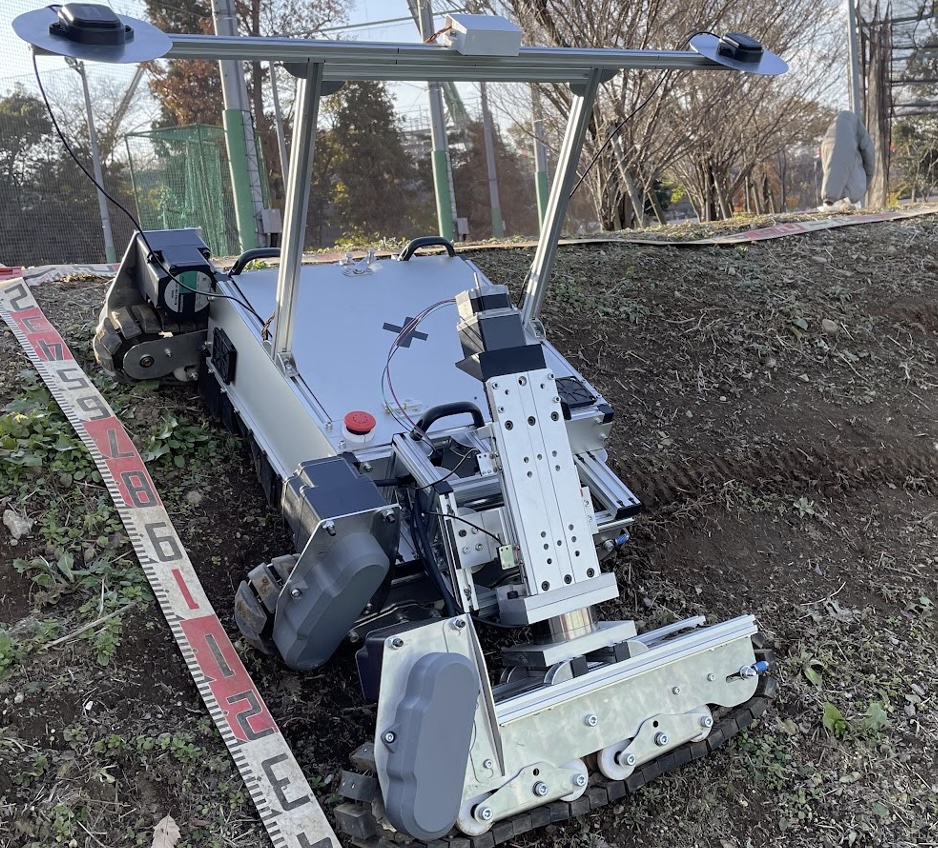

月面のような未開拓・不整地地盤を走破する画期的な移動ロボットシステムの構築に取り組んでいます。月面はレゴリスと呼ばれる非常に粒子の細かい軟弱砂で覆われています。軟弱砂上および岩や石を乗り越えるための特殊な車輪開発や特殊機構を持ったロボットの開発をしています。また、このような研究から発展させた災害レスキュー車両用の空気レスタイヤや農業機械の開発, そして機構・センシング・制御・AIといったものも活用したあらゆる社会課題のためのロボティクスシステムの研究を行っています。

月や火星といった大変厳しい環境において移動や作業を実現させるロボットを創造・開発・研究していくことで, 地上における不整地フィールドにおいて, 新しく, そして画期的なロボットシステムを提案しています. 特に災害現場, 農業現場といった移動や作業が難しい環境において, 機構・センシング・制御・AIといった技術による社会貢献・支援できるシステム作りをしています.