飯塚研究室 学生チームが第29回衛星設計コンテストで奨励賞、最優秀模型賞を受賞
2022/01/11
- 機械制御システム学科
【受賞者】佐々木 航平 さん(システム理工学専攻 修士1年) 村中 優里子 さん(システム理工学専攻 修士1年)
上野 佑理 さん(機械工学専攻 修士1年) 相良 健太 さん(機械制御システム学科1年)
【指導教員】飯塚 浩二郎 教授(機械制御システム学科)
【大会名】第29回衛星設計コンテスト 【賞名】奨励賞、最優秀模型賞
【作品テーマ】月極域投てき移動ミッション「SHAKE」
上野 佑理 さん(機械工学専攻 修士1年) 相良 健太 さん(機械制御システム学科1年)
【指導教員】飯塚 浩二郎 教授(機械制御システム学科)
【大会名】第29回衛星設計コンテスト 【賞名】奨励賞、最優秀模型賞
【作品テーマ】月極域投てき移動ミッション「SHAKE」
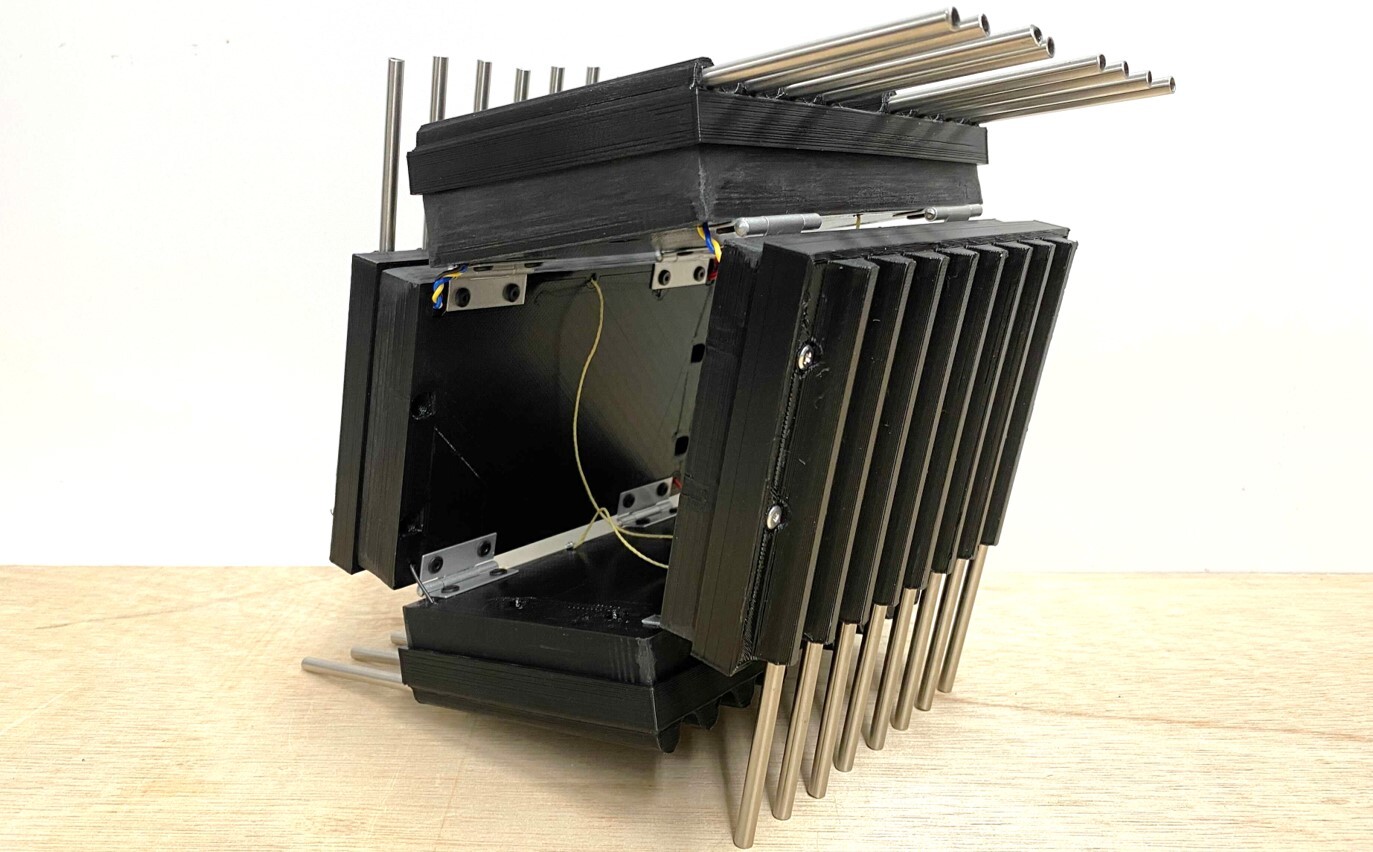 小型ロボット
小型ロボット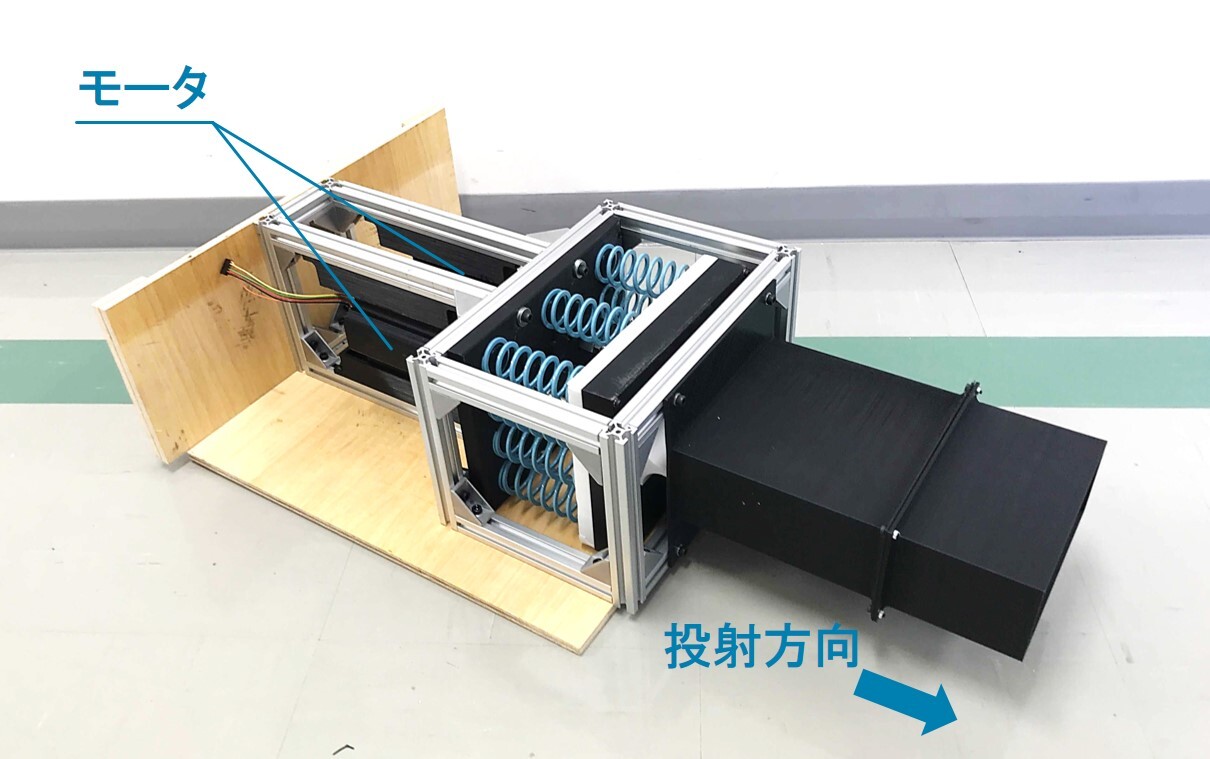 投てき機
投てき機【発表内容】
近年の宇宙開発において、月面での持続的な活動を行うために必要な資源や技術への需要が高まっています。その中でも水資源を十分に確保することは、非常に重要な要素といえます。そこで本グループでは、水資源が存在するとされる領域を探査し、サンプル採取することを目的としたロボットとその移動手段を提案しました。このロボットは四角い形をしており、4つある面をパタパタと倒すように動かすことで進むことができます。面で地面を押さえるようにして進むため、崩れやすい砂場での登坂性能に優れています。さらに、限られた資源やエネルギーの中で効率的にこのロボットを運用する方法として、目的地までの移動方法に投てき移動を採用しました。投てき機がロボットを投げ、目的地に到着したロボットは探査・サンプル採取などを行い、元の場所まで戻るというのが一連の流れとなっています。投てき機はモータの回転によってバネにエネルギーをため、一気に解放することで押し出すようにしてロボットを投げるような構造をしています。これにより繰り返しの投てきが可能であり、1機のロボットでも複数回の探査ができます。
今回の発表内容では、実際にロボットと投てき機を製作し、落下衝撃耐性を調べる実験や投てきした飛距離を調べる実験などを行いました。実験的に検証を行うことで、ロボットの破損個所や投てきした際の挙動などを把握することができました。
【今後の展望】
投てき機構でバネのエネルギーを一気に解放する際に、大きな反動が発生します。実験でも反動によるエネルギー損失が大きく飛距離を伸ばすことができませんでした。この点について、月面という低重力環境を考慮しつつ反動軽減することが課題となります。また、ロボットと投てき機の小型・軽量化を図ることで、今後計画される様々なミッションに導入することが可能になると考えています。
近年の宇宙開発において、月面での持続的な活動を行うために必要な資源や技術への需要が高まっています。その中でも水資源を十分に確保することは、非常に重要な要素といえます。そこで本グループでは、水資源が存在するとされる領域を探査し、サンプル採取することを目的としたロボットとその移動手段を提案しました。このロボットは四角い形をしており、4つある面をパタパタと倒すように動かすことで進むことができます。面で地面を押さえるようにして進むため、崩れやすい砂場での登坂性能に優れています。さらに、限られた資源やエネルギーの中で効率的にこのロボットを運用する方法として、目的地までの移動方法に投てき移動を採用しました。投てき機がロボットを投げ、目的地に到着したロボットは探査・サンプル採取などを行い、元の場所まで戻るというのが一連の流れとなっています。投てき機はモータの回転によってバネにエネルギーをため、一気に解放することで押し出すようにしてロボットを投げるような構造をしています。これにより繰り返しの投てきが可能であり、1機のロボットでも複数回の探査ができます。
今回の発表内容では、実際にロボットと投てき機を製作し、落下衝撃耐性を調べる実験や投てきした飛距離を調べる実験などを行いました。実験的に検証を行うことで、ロボットの破損個所や投てきした際の挙動などを把握することができました。
【今後の展望】
投てき機構でバネのエネルギーを一気に解放する際に、大きな反動が発生します。実験でも反動によるエネルギー損失が大きく飛距離を伸ばすことができませんでした。この点について、月面という低重力環境を考慮しつつ反動軽減することが課題となります。また、ロボットと投てき機の小型・軽量化を図ることで、今後計画される様々なミッションに導入することが可能になると考えています。
お問い合わせ
芝浦工業大学 企画広報課
〒135-8548 東京都江東区豊洲3-7-5(豊洲キャンパス本部棟2階)
TEL:03-5859-7070 / FAX:03-5859-7071
E-mail:koho@ow.shibaura-it.ac.jp