カリキュラム
工学的手法で生命現象の解明と
医療・福祉技術への応用をめざす
生命・生体機能を維持・回復させるための診断機器や治療機器、および支 援システムの研究開発をめざします。そのため、機械系、電気系、制御系、 材料系、および医工学系の幅広い専門科目を設けています。また、体験 による知識定着および技術修得を目的とし、医療福祉機器設計に関する 演習や生命医工学に関する実験を含む幅広い実験演習科目を実施します。1年次 学科共通の基礎科目を学ぶ
●主な科目生 命 科 学 概 論 / 解 剖 学/生 理 学Ⅰ/ Basic Biology /医学 概 論/機械力学/材料力学/ Introduction of Bioengineering
2年次 めざす方向別の履修モデルに沿って学ぶ(医療機器関連、福祉機器関連)
●主な科目生体計測学/Assistive Technology /生命統計 学/生体力学/機械設計製作演習/生命医工学実 験Ⅰ・Ⅱ/流れ学/電気回路/ CAD/CAM 演習/ システム工学 A・B
3年次 実験や演習を中心に、さらなる専門知識の修得をめざす
●主な科目生体材料学/生命倫理/公衆衛生学/医用画像工 学/電子回路/医療福祉機器設計演習/生命医工 学セミナー/メカトロニクス/シミュレーション工学 演習/福祉リハビリテーション工学
4年次 研究室に所属して卒業研究を行う
授業紹介

機械力学
質点系の力学やエネルギー、摩擦などについて理解し、機械という「もの」をつくる際に、どのようにすれば創意工夫ができるのかを学習します。

生命医工学実験Ⅱ
生体の信号および構成成分の計測・解析に必要な基礎知識について実験を通じて学修し、実験レポートの作成および口頭試問の実施により理解を深めます。

医療福祉機器設計演習
高齢者、下肢障害者、視覚障害者の疑似体 験とその福祉機器の体験を行い、現在の福 祉機器の課題や改善点を考察します。また、 医療福祉機器の設計演習を行い、機器の 設計概念、設計手法の修得をめざします。
研究テーマ例
ニューロリハビリテーションに基づく支援機器・訓練機器の開発
ニューロリハビリテーション工学研究室:山本 紳一郎 教授脳脊髄神経系に働きかけるニューロリハビリテーションの概念に基づく運動機能障害者のための新たな支援機器や訓練機器の設計・開発を進めています。免荷式歩行訓練システム(AirGait)の開発や姿勢バランス評価システムの開発、最適な義肢装具設計のための計測・シミュレーション等、多岐にわたる研究開発を他の大学や研究所との共同プロジェクトとして実施しています。
 独自の空気圧人工筋を用いた免荷式歩行訓練システム(AirGait)
独自の空気圧人工筋を用いた免荷式歩行訓練システム(AirGait)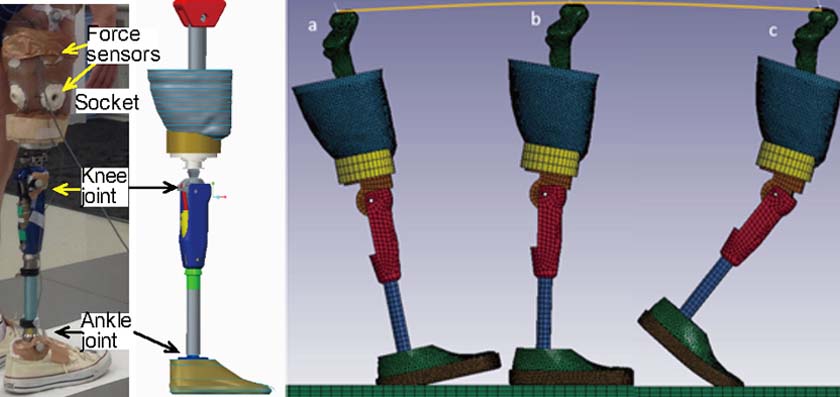 大腿義足の有限要素解析による動的シミュレーション
大腿義足の有限要素解析による動的シミュレーション海外との活動事例
マレーシア サラワク大学工学部との夏季共同授業「グローバル課題解決実習」
バイオ流体科学研究室 × マレーシア/サラワク大学マレーシアの学生との共同授業として、現地の課題解決に向けた活動に取り組みます。現地の学生達と協力し、3DCAD設計、試作、評価実験を通じ、課題解決策を提案。これまで、「福祉機器開発」、「食品製造技術開発」、「エネルギー回収技術開発」に取り組んできました。今年度は「材料と構造工夫による最適化」がテーマとなります。
 マレーシアの学生と協力し水力発電装置を試作するメンバー達
マレーシアの学生と協力し水力発電装置を試作するメンバー達 3Dプリンタで試作した水力発電装置について、その性能を検証する実験をしている風景
3Dプリンタで試作した水力発電装置について、その性能を検証する実験をしている風景卒業研究の例
障がい者のための歩行訓練システムの開発
歩行困難な人のための歩行訓練用装置およびその評価システムの開発を行っています。歩行訓練に必要な免荷(脚にかかる負担を減らす)装置やアシスト装置を開発するとともに、訓練したときの筋や神経の働きを調べ、効果的に訓練できるシステムの開発をめざしています。

この研究の応用先
適切な免荷歩行訓練により、脊髄損傷者や脳卒中片麻痺者の脊髄内の神経回路網の働きが機能的に変化し自立歩行が改善されることを、今後日本の多くの病院に提唱し、実施されるよう広めていきます。
遠隔操作による手術ロボットシステムの開発
カテーテル(手術用の細い管)を用いた血管内手術の際に、カテーテルの体内誘導を離れた場所から可能にするマスタースレーブシステムの開発を行っています。医師が直接患者の体に触れて手術を行っているかのように力情報を指先に提示可能なシステムです。
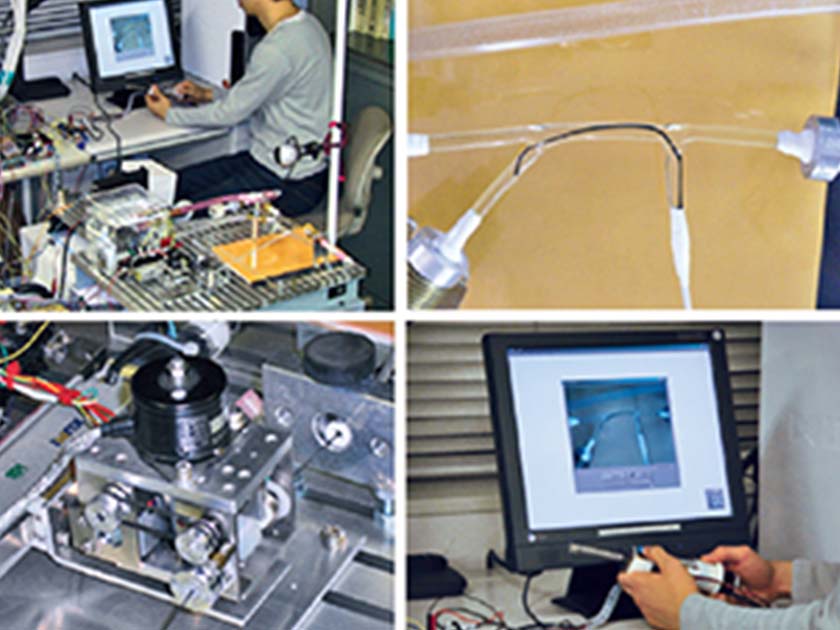
この研究の応用先
カテーテル手術の際にはX線透視装置で血管の位置を確認しながら誘導を行うため、医師が被ばくしてしまう恐れがあります。本システムは遠隔操作で別室から操作を行うことで医師を被ばくから守ることが可能です。