
robot
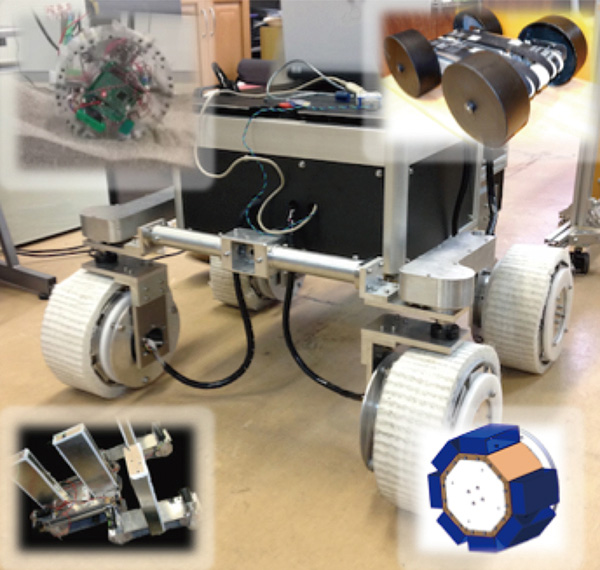
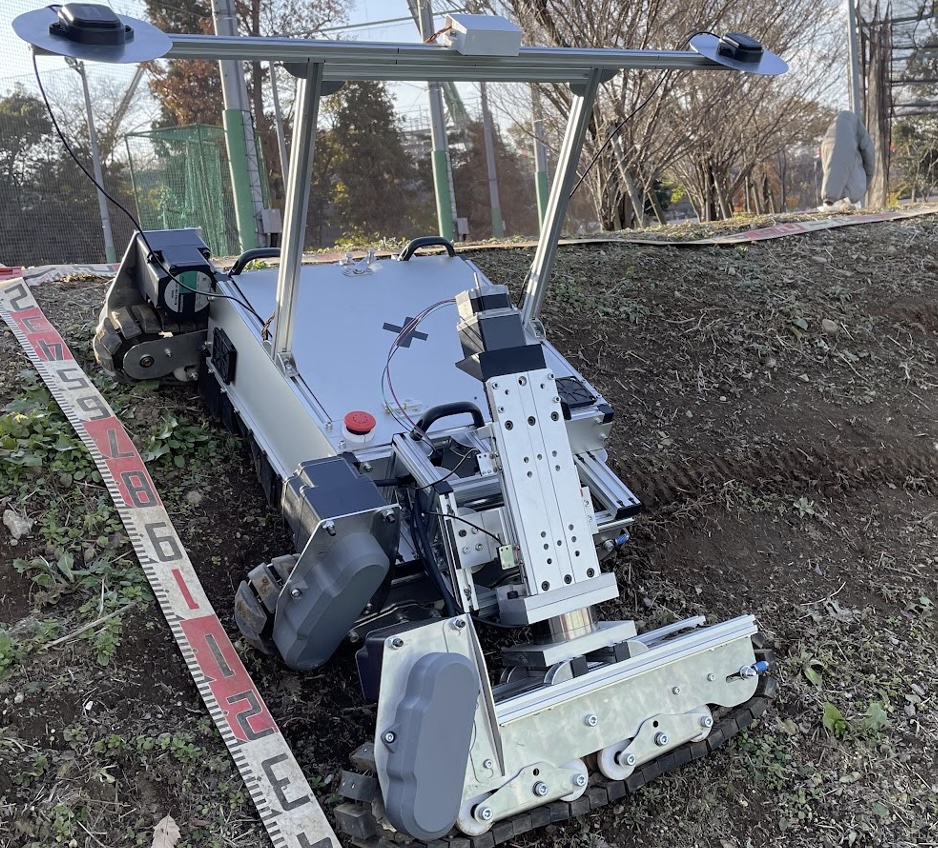

We are developing an innovative robotic mobility system capable of traversing unexplored and irregular terrains such as the lunar surface. The Moon is covered with extremely fine, loose sand known as regolith. Our research focuses on designing special wheels and unique mechanisms that enable robots to move effectively on such soft terrain and overcome rocks and obstacles. Building upon this lunar mobility research, we are also developing airless tires for disaster rescue vehicles and mobility technologies for agricultural machines. In addition, our work extends to the creation of advanced robotic systems that integrate mechanical design, sensing, control, and AI to address a wide range of social challenges.

By creating, developing, and studying robotic systems capable of mobility and operation in extremely harsh environments such as the Moon and Mars, we propose innovative and groundbreaking robotic systems for terrestrial rough-terrain applications. In particular, our research focuses on designing systems that can contribute to society through advanced mechanisms, sensing, control, and AI technologies―especially in challenging environments such as disaster response sites and agricultural fields, where mobility and task execution are difficult.