Seeing Farther: A New Camera-Based Technique Detects Distant Vehicles for Safer Roads
- Research
Researchers develop a simple, accurate method to detect distant vehicles by analyzing nearby motion, providing a new tool to reduce intersection accidents
Road accidents often stem from failing to notice vehicles. A recent study introduced a method for detecting distant vehicles with over twice the accuracy of existing systems. Instead of using road markings, it analyzes the motion of nearby vehicles to estimate the road’s trajectory and vanishing point, capturing distant road areas. By enlarging distant regions, the system can more accurately detect faraway vehicles, thereby enhancing safety by providing distant-vehicle information to drivers and pedestrians.
Title: Detecting Distant Vehicles Through Near-Motion Analysis
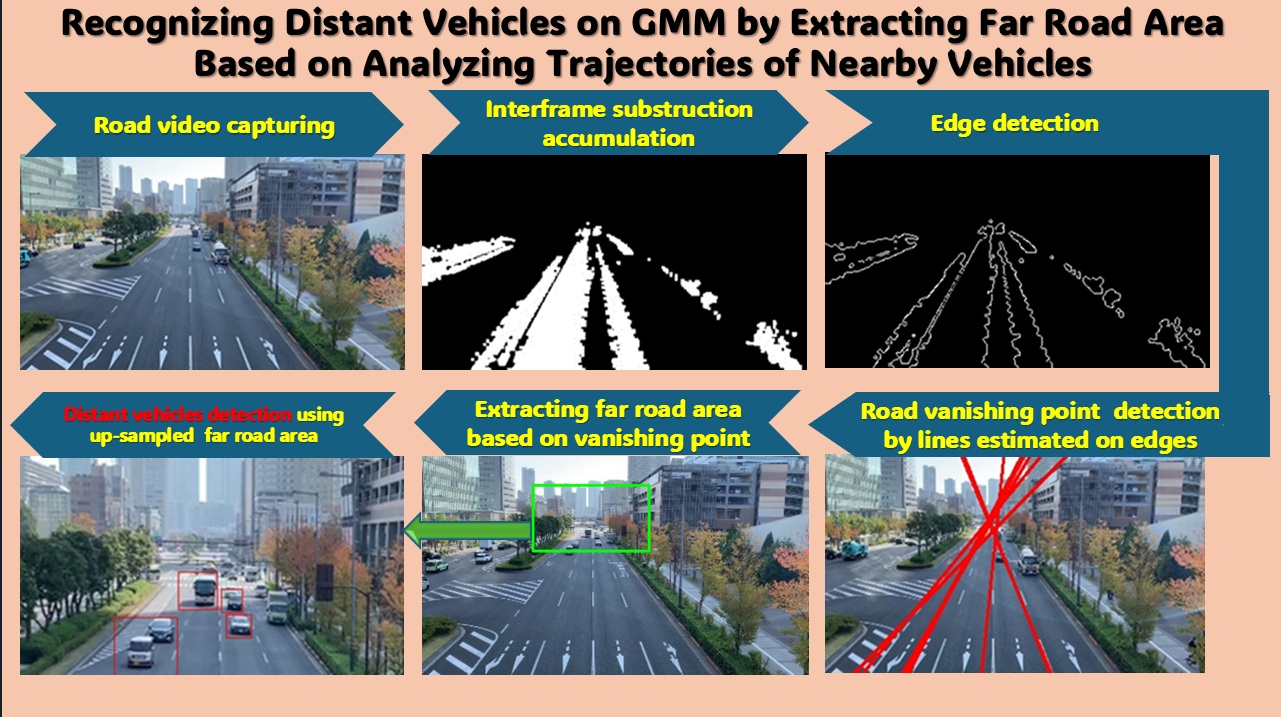
Caption: The proposed system identifies the far-road region by analyzing the motion of nearby vehicles. This region is then enlarged, allowing the system to detect distant vehicles and improve intersection safety for both drivers and pedestrians.
Credit: Professor Chinthaka Premachandra from Shibaura Institute of Technology, Japan
License Type: Original content
Usage restrictions: Cannot be used without permission.
Intersections are among the most unpredictable spots on city roads. Drivers may struggle to notice approaching vehicles, and pedestrians often misjudge when it is safe to cross. In Japan, nearly half of all road accidents occur at intersections, highlighting an urgent need for smarter systems that can improve visibility and safety.
Now, a team of researchers led by Professor Chinthaka Premachandra from the Advanced Electronic Engineering Course, the School of Engineering and the Graduate School of Engineering and Science at the Shibaura Institute of Technology (SIT), Tokyo, Japan, and Eigo Ito from the Department of Electronic Engineering, School of Engineering, SIT, Japan, has developed a new technique for accurately identifying distant vehicles. This research was published in Volume 6 of the journal IEEE Open Journal of Intelligent Transportation Systems, on September 26, 2025.
Most current vehicle detection methods depend on deep learning algorithms that require powerful computing systems. However, these methods often struggle when vehicles appear small or unclear in the distance. The newly developed method takes a simpler, more practical approach—it examines the movement of nearby vehicles to predict where the road extends far ahead.
“Most detection systems work well for vehicles close to the camera, but their accuracy drops sharply for those farther away,” explains Prof. Premachandra. “We wanted to overcome this limitation with a lightweight approach that doesn’t require large datasets or complex neural networks.”
The system analyzes continuous video footage of the road and tracks the motion of nearby vehicles from frame to frame. By mapping these movements—called trajectories—it estimates the road’s vanishing point, or the area where the road appears to narrow toward the horizon. Once this region is identified, the system digitally enlarges it, making distant vehicles more visible.
Next, the system uses a mathematical model known as a Gaussian Mixture Model to detect moving vehicles in the magnified image. This process helps identify even tiny, faraway vehicles that might otherwise go unnoticed—all while using a standard camera and modest computing power.
In tests conducted under both day and night conditions, the method achieved more than twice the detection accuracy of conventional systems. It even outperformed some deep learning-based techniques while running smoothly at 30 frames per second on small, low-cost devices, such as the Raspberry Pi and Jetson Nano.
“Detecting faraway vehicles earlier can significantly reduce intersection-related accidents,” says Prof. Premachandra. “Imagine a system that warns pedestrians before they step onto the crosswalk or alerts drivers to vehicles still hundreds of meters away—it could make daily commuting much safer.”
Prof. Premachandra believes that this innovation could form the foundation of next-generation guidance systems that communicate real-time traffic information to both drivers and pedestrians. For example, cameras installed at intersections could detect vehicles approaching from a distance in all directions and issue alerts to drivers and pedestrians near the intersection via connected devices or traffic signals.
Beyond safety, the technology could contribute to the development of intelligent transportation systems (ITS)—which are networks that integrate vehicles, sensors, and infrastructure to create safer and more efficient roads. Because the system operates without heavy computational resources, it can be easily deployed in urban and rural areas alike.
While the initial results are promising, Prof. Premachandra notes that further improvements are planned. The team aims to test the system under different weather conditions, such as fog, rain, and snow, since these conditions often obscure visibility. They also intend to expand the system’s capability to classify different vehicle types and integrate it into broader ITS frameworks.
“Our goal is to make roads safer for everyone,” says Prof. Premachandra. “Even a few extra seconds of early warning can make the difference between a safe journey and a serious accident.”
By combining smart observation with simple computation, this study demonstrates that innovation in traffic safety doesn’t always require complex artificial intelligence—sometimes, it just takes a sharper look at the road ahead.

Title: Smarter Eyes on the Road
Caption: A busy road intersection where vehicles approach from multiple directions. The new camera-based method helps detect distant vehicles earlier, reducing the risk of accidents for both drivers and pedestrians.
Credit: University Ave., Berkeley from Openverse
Source Link: https://openverse.org/image/ffb34e0d-a4b7-429c-b148-717449d257bb?q=road+intersection+traffic&p=11
License Type: CC BY-NC 2.0
Usage restrictions: Credit must be given to the creator. Only non-commercial uses of the work are permitted.
Reference
|
Title of original paper: |
Recognizing Distant Vehicles on GMM by Extracting Far Road Area Based on Analyzing Trajectories of Nearby Vehicles |
|
Journal: |
IEEE Open Journal of Intelligent Transportation Systems |
|
DOI: |
Authors
About Professor Chinthaka Premachandra from Shibaura Institute of Technology, Japan
Dr. Chinthaka Premachandra (Senior Member, IEEE) earned his BSc and MSc degrees from Mie University and his PhD in Engineering from Nagoya University, Japan. He is currently a Professor at the Shibaura Institute of Technology, Japan, where he heads the Image Processing & Robotics Laboratory. Over more than 15 years of academic experience, he has published extensively on AI, UAVs, image/audio processing, intelligent transport systems, and mobile robotics. His honors include the IEEE Sensors Letters Best Paper Award, the IEEE Japan Medal, and awards from IEICE/IPSJ. He also serves as Associate Editor for major IEEE journals.
Funding Information
No funding information.